Todo el mundo se inicia en el pedaleo sentado sobre el sillín, pues favorece el equilibrio. Pero aprender a pedalear de pie es un complemento indispensable para quien quiera disfrutar de todas las posibilidades del ciclismo. Por una parte nos permite salir de un apuro en terreno llano, sea para remontar un corto repechón o para esprintar. También supone una higiénica medida para reducir durante un tiempo la presión del cuerpo sobre la sufrida próstata del ciclista masculino y además se mejora el riego sanguíneo en la zona. En el caso femenino, obviamente, las partes de la anatomía que se aligeran de la presión son otras, que también lo agradecen. Sin dudar lo mejor para la salud es levantarse del asiento cada pocos minutos.
Pero donde el pedaleo de pie puede usarse a pleno rendimiento es en las escaladas de puertos, alternándolo con la posición sentada. En pie sobre los pedales hacemos un ejercicio parecido a ir subiendo escalones de una altura aparente del doble de longitud de la biela que uses: 34-36 cm; pero más fáciles de subir puesto que en realidad el desnivel superado es menor de 34 cm. La razón es esta: subiendo un “escalón” haces medio ciclo de pedaleo, por lo tanto tu plato ha girado medio recorrido. Esto significa que en un duro puerto del 10%, avanzarías por el asfalto esta distancia, lo que supone, por lo tanto, 20,7 cm de desnivel ganados, no 34cm. Aproximadamente una altura como la de los escalones habituales (no creo que sea ninguna casualidad) pero con el peso añadido de la bici a cuestas.
A 60rpm con 42×21 subirías dos escalones por ciclo, dos escalones por segundo, estos 41,4 cm/s equivalen a unos 1500m/h….. lo que permitiría al lector subir el Alpe d’Huez en 52 minutos…..
A veces se dice que al pedalear de pie el peso del cuerpo “te ayuda”. No es correcto. Si no lo crees, prueba a incrementar tu peso con una gran mochila para “ayudarte”. De pie sobre los pedales, tu peso es el verdadero estorbo que hay que levantar dos veces por segundo para poder seguir a 60 revoluciones por minuto de cadencia. Además los buenos escaladores suelen ser de poco peso
Es fundamental que, al igual que en una carrera a pie, no oscile el centro de gravedad de nuestro cuerpo arriba y abajo, pues eso sale caro en términos de rendimiento. La imagen mental a retener es que, más que subir tú arriba de un escalón (el pedal que está en alto), tu vas a hacer bajar los pedales, sin que el cuerpo suba respecto al suelo. Si el lector se fija en el pedaleo de los profesionales observará que su cabeza no da saltitos apenas, ni siquiera en los demarrajes) y su cuerpo no va cayendo como un saco a ambos lados de la bici.
Para trasladar tu centro de gravedad y realizar la fuerza adecuada necesitas cambiarlo de un lado al otro. Para hacerlo es mucho mejor mover la bici que dar bandazos con el cuerpo, tal como hacen ellos, forzosamente dos veces por cada ciclo de pedalada… y mientras el cuerpo está de pelvis hacia arriba básicamente quieto! Ladeando la bici ahorras esfuerzo en las piernas, pues tus brazos enderezan la bici realizando la fracción del esfuerzo que te has ahorrado antes al encontrar el pedal algo más bajo, unos tres cm y mejor situado bajo tu centro de gravedad. El movimiento lateral unido al hecho demostrado de que de pie se cansa uno más que sentado en el sillín, nos hace disminuir la cadencia hasta un ritmo parecido al de la carrera a pie.
Este movimiento armonioso de mover con las manos lateralmente el manillar puede hacerse perfectamente sin ninguna crispación, como cuando vemos un ciclista de pie con las manos en las gomas de las manetas los dedos relajadamente abiertos. En cambio, quien pedalea clavado, al no poder doblegar el desarrollo en el punto más duro del pedaleo, aprovecha para tirar más o menos fuerte del manillar hacia arriba para superarlo con la ayuda de los brazos.
Esto tiene lógica en un profesional esprintando unos segundos (a veces incluso dañan el manillar), pero es absurdo ver así a un aficionado que pasa una hora subiendo un puerto. La fuerza de los cuadríceps es más que suficiente para pedalear a pocas rpm, pues cualquier aficionado puede mover en la prensa de piernas de un gimnasio 100 kg muchas veces (50 kg por pierna) a ese mismo ritmo. Es natural, ya que cuando subimos unas escaleras cada pierna carga con todo nuestro cuerpo.
No son tan evidentes como parece. Por ejemplo, pedaleando sentados el consumo energético es menor pues no movemos más que las piernas, pero en contrapartida, sentedo disponemos de menos fuerza para aplicar en el punto más duro del ciclo de pedaleo, que se supera mejor estando en pie como cualquier chaval que tiene su primera bici sin marchas ha comprobado en las cuestas.
El pedaleo de pie cae a sólo a una cadencia de 60-70 rpm, los ciclistas no suelen desear más cadencia (excepto Amstrong) y el corazón indica que el umbral anaeróbico es de 5-10 latidos más alto. Esto es muy curioso, pues significa que en pie aguantamos mejor las pulsaciones altas, probablemente por una ventilación mejor.
Hay otros problemas además del mayor consumo de oxígeno. Suele pedalearse de pie a bajas velocidades, que es precisamente cuando hay que aplicar mejor la dirección de las fuerzas a los pedales, pues la poca inercia del ciclista a baja velocidad no le permite pasar el punto muerto con facilidad como en llano yendo rápido. Un inconveniente menor es que escalando de pie, el centro de gravedad se desplaza hacia delante y hay menos peso en la rueda trasera.
Fue tan espectacular que merece una líneas a parte. “El Pirata” creó su propio estilo de pedaleo en pie, agarrado en la parte baja del manillar para desplazar al máximo su cuerpo hacia delante y aplicar el máximo de fuerza, además mejoraba el reparto entre los músculos de la propia pierna usando mejor los isquiotibiales para subir. Si el lector prueba a poner su peso muy adelantado (pero no hace falta que se agarre en la parte baja) podrá apreciar qué bien puede lanzar las rodillas hacia arriba en esa posición, pedaleando a base de usar los isquiotibiales, muy lejos del pedaleo en pie que hacemos habitualmente. De esta forma el pedaleo de pie “estilo Pantani” permite descansar alternativamente partes de la musculatura. Por si fuera poco obtenía un aerodinamismo mayor, que a los 20 km/h o más a los que solía escalar le suponía una ventaja modesta pero nada despreciable a la hora de arañar segundos al crono en la línea de meta.
La desventaja de su estilo es, por una parte, la incomodidad de la posición para respirar, aspecto básico en las subidas, donde el diafragma debe subir y bajar cómodamente. De pie debes desplazar el centro de gravedad hacia delante (pues no estás sentado). Si tu peso está apoyado pasivamente todo el tiempo sobre el manillar, éste no te ayuda para nada a escalar. Comparativamente, estás apoyando tu cuerpo como un objeto en la barandilla de una escalera con la esperanza de poder ascender más descansado los escalones, pero el cuerpo hay que remontarlo.
Por el contrario, el peso del cuerpo, una vez levantado debe ‘entregarse’ a fondo en cada biela, alternativamente, a tope cuando están casi horizontales, para aprovechar bien el esfuerzo. Un error de principiante consiste en bajar descolgándose “hasta el fondo” en cada costado, dando bandazos profundos, como esperando que haya un poco de rebote, parecido al de la carrera a pie. Pedaleando no hay nada. La biela no es elástica. Si presionas hacia el suelo en la parte baja te quedas clavado.
Subiendo de pie se consume más energía, más oxígeno, suben más las pulsaciones… pero a pesar de todo, la musculatura agradece los cambios de postura y a la poca velocidad con que se escala, la pérdida de velocidad por el menor aerodinamismo yendo erguidos es exigua. Tan solo entre los grandes escaladores, que suben todos los puertos a más de 20 km/h, la posición aerodinámica subiendo puede marcar la diferencia.
Es recomendable cambiar a una marcha más suave antes de detenerte, por ejemplo, si ves que los semáforos cambian de color, para que te resulte fácil volver a arrancar. Si tu bicicleta tiene cambios manuales, tendrás que cambiar de marcha para adaptarla al terreno. Utiliza las marchas para mantener una velocidad de pedaleo cómoda. Las bicicletas eléctricas funcionan de forma óptima entre 60 y 80 rpm (revoluciones por minuto), es decir, un poco más rápido que una pedalada completa por segundo. Tu bicicleta eléctrica tiene varios modos diferentes para que puedas variar la asistencia del motor. Con mayor asistencia, el pedaleo resulta más fácil, pero disminuye la autonomía de la batería. Como ya sabes, en las e-Bikes, el motor entra a funcionar solamente cuando accionas los pedales, y se desconecta cuando dejas de darle a los pedales.
Una de las piezas clave del sistema es un componente que es difícil de ver: el sensor de pedaleo asistido. Este es el encargado de determinar en qué momento se pone a funcionar el motor y cuándo debe pararse, y nos da también una buena indicación de la calidad y del precio de la E-Bike. En este artículo repasamos los tipos de sensores que nos podemos encontrar, advirtiéndote que hay muy poca bibliografía sobre el tema y que los fabricantes son bastante reacios a proporcionar información, así que quizás hemos incurrido en alguna imprecisión.
El sensor de movimiento (también llamado de velocidad o de cadencia) detecta movimiento en el eje de centro. Se compone de un disco magnético montado en el eje de de centro y un captor fijo montado en el cuadro de la bicicleta. El disco gira solidariamente con el eje y alberga una docena o más de pequeños imanes. El captor está separado del disco por medio centímetro y detecta los pulsos de estos imanes cuando pasan frente a él. Obviamente, el motor no se pondrá a funcionar hasta que no pasen uno o varios imanes por el captor. Lamentablemente no, porque la señal que recibe el controlador es distinta en ambos casos. Los sensores de par o de torque son más sofisticados y tienen prestaciones diferentes.
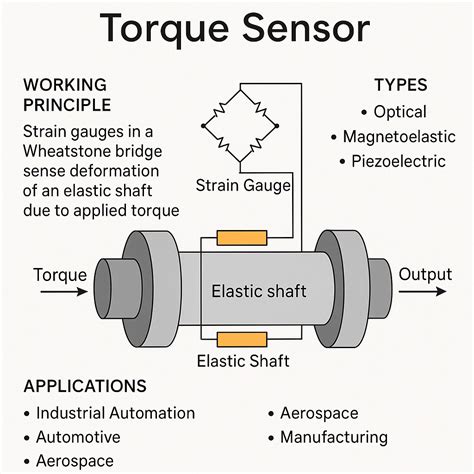
Un sensor magnetoelástico mide el campo magnético que emana de un segmento imantado, con una frecuencia que supera las 1.000 veces por segundo. Este campo cambia en proporción a la fuerza aplicada al eje en cada momento puntual. Casi todos los sistemas centrales como Bosch, Yamaha y Brose se basan en sensores de torque, aunque varios fabricantes de alta gama también lo han sabido incluir en sistemas con motor HUB.
Como ves en esta foto, el surco en forma de «L» permite un ligero movimiento de la pletina cuando se aplica una fuerza a una de las dos partes. Es natural que durante la pedaleada no se aplique una fuerza constante en algún momento de la rotación. Para compensar esta ligeras variaciones de torque y evitar unos indeseados tirones , el controlador también toma lectura de la velocidad de la e-bike e inyecta una potencia extra constante mientras se pedalea.
El sensor de movimiento mide simplemente con qué rapidez estás pedaleando, y le da exactamente igual el resto de factores. La respuesta es un sí o un no: el motor actúa o se desconecta en base a la velocidad de giro del pedal. Sin embargo, el sensor de torque toma en consideración tu propio esfuerzo. En cuanto a la reactividad, el sensor de torque es imbatible: con tan solo pisar el pedal, la bici sale disparada. Y cuanta más presión ejerzas, más rápido saldrás. Con este sistema ¿hace falta un acelerador?. Pero donde realmente sabrás valorar el sensor de par es en la eficiencia del sistema.
Pero para ser honestos, también tenemos que alabar las virtudes de los sensores de movimiento. En pocos años han mejorado considerablemente y ahora la respuesta es mucho más ágil y dinámica gracias a los nuevos controladores y al aumento del número de imanes. Saldrás de un cruce de carretera con total seguridad y rapidez.
La Elección Correcta de la Relación Plato-Piñón
Se vienen los grandes fondos de ciclismo de ruta de Chile en el segundo semestre, y casi todos tiene mucha subida, por lo que ha resurgido la eterna discusión respecto de la mejor combinación de plato y piñones para una carrera de este tipo. Antes de entrar en detalles permítanme contarles que un amigo mío le tenía fobia al plato chico. Aunque no lo reconocía, mi impresión es que consideraba deshonroso usarlo. Su lógica era que un buen ciclista sólo usa desarrollos grandes. Digamos de paso que era un excelente ciclista y tenía mucha fuerza. Tanto era su trauma que subía a Farellones con plato grande, y por supuesto arriba nos hacía notar lo que había hecho.
Se llama desarrollo a la combinación de platos y piñones. Los desarrollos más altos se alcanzan con el plato grande y los piñones más pequeños. Los desarrollos más chicos se logran con el plato chico y los piñones más grandes. Los números al interior del cuadro son el número de veces que gira la rueda por cada pedaleada. En el caso de una combinación 53-11 la rueda gira 4,82 veces por cada pedaleada. Sabiendo que una rueda 700-23 avanza 2,1 metros en cada giro, entonces sabemos que con esa combinación avanzamos 10,1 metros por cada pedaleada (4,82*2,1).
La elección correcta de la relación plato-piñón, dependerá de las características del ciclista, del terreno y del esfuerzo asociado. Como regla general se dice que lo mejor es mantener siempre una cadencia constante y, en consecuencia, elegir la combinación plato-piñón que nos permita mantener cómodamente esa cadencia. Pero hay otras consideraciones al momento de elegir la relación plato-piñón. Una es la de evitar que la cadena quede demasiado cruzada, por el riesgo que tiene de cortarse o de romper el desviador trasero. Esta situación se da cuando usamos el plato 53 con los piñones 23, 25 y 28 y cuando usamos el plato 39 con los piñones 11, 12 y 13. Los hemos marcado en rojo en el cuadro. No deben usarse, pero tranquilos ya que no perdemos nada. Fíjense que las combinaciones en rojo son perfectamente reemplazables por otras combinaciones menos traumáticas para la cadena. La 53-28 con la que logramos 1,89 giros de rueda por cada pedaleada es casi equivalente a la 39-21 donde se alcanzan 1,86 giros. Revisen los otros casos en rojos y encontrarán su equivalente. Los marcados en naranjo prácticamente se repiten en los dos platos y por lo tanto son alternativos.
Renunciar al uso del plato chico, como mi amigo, es evidentemente un error, ya que implica renunciar a una gama de desarrollos insustituibles y que solo parcialmente se pueden compensar con un indeseable cruce de cadena o con una no recomendada bajísima frecuencia de pedaleo. De hecho, mi amigo subía muy “trancado” con una frecuencia en torno a 50. En el caso del plato 1x los desarrollos van de 4,18 a 1,44 con lo cual se pierde algo en los extremos.
Hay quienes sostienen que además de ser un tema matemático, como lo he descrito hasta ahora, también hay consideraciones de sensibilidad y sensaciones al momento de elegir el tamaño de los platos. Los que defienden esta teoría argumentan que no es lo mismo un plato chico de 36, 39 ó 42. Dicen que se siente distinto. Puede que algo de razón tengan, pero evidentemente el problema es 90% o más matemático. Elige la combinación de piñones que te otorgue una secuencia fluida de cambios.
Cómo Elegir El Desarrollo De Tu Bicicleta
Tipos de Motores y Estándares en Bicicletas
¿Te has topado alguna vez con la duda de qué motor utiliza tu bicicleta? ¿Necesitas comprar volante o motor y no sabes qué comprar? ¿Te ha pasado que estás buscando en la web un volante para tu motor BB86, y no sabes si el volante BB386EVO que justo está en oferta es compatible con tu cuadro y motor? Resulta que en la última década (o incluso antes) han aparecido una infinidad de nuevos estándar de motores, lo cual lo convierte en un oxímoron ya que con tanta variedad ya no es un estándar.
Los motores con hilo consisten en un sistema de rodamientos que van apernados a la caja de motor. Existen varios tipos de motores así, siendo los más conocidos los que mencionaremos a continuación. Estos motores pueden venir con 2 tipos de hilo, distinto diámetro y ancho de caja de motor, lo cual determina qué tipo sirve para tu cuadro. Ancho de caja de motor: 68 ó 73 mm (las más comunes). Es el clásico motor que venía en las bicicletas más antiguas, o en las más actuales de gama baja. Consiste en un eje de acero (o titanio si es más cuico) de 17 mm de diámetro al centro, con rodamientos a su alrededor. El ancho de caja que necesitas dependerá específicamente de tu cuadro. Si tu cuadro tiene caja de motor de 68 mm de ancho necesitas un motor para caja 68. Puedes usar un motor caja 73 en un cuadro con caja 68, pero deberás usar espaciadores para rellenar esos 5 mm de diferencia entre el cuadro y el motor. El largo de eje que necesitas será dado por tu volante.
Ambas siglas hacen alusión al tipo de angulación y profundidad del eje cuadrado. JIS significa Japanese Industrial Standard, mientras que ISO significa International Organization for Standarization (aunque la sigla sería IOS así. En teoría sólo debes usar motores JIS con volantes JIS y motores ISO con volantes ISO. De todas maneras se puede usar volante ISO con motor JIS, sólo que dejará 4,5 mm más afuera las bielas. En palabras simples, es la evolución del eje cuadrado, pero que ahora posee estrías en sus extremos para la interfaz entre bielas y eje de motor. Al igual que el eje cuadrado, este tipo de motor viene para caja 68 ó 73 mm (ni idea si existirán para caja italiana de 70 mm) y viene en distintos largos de eje. El sistema más conocido y usado al día de hoy. Viene en prácticamente en todas las bicicletas de gama baja/media, media, y hasta gama alta.
Aprovechando que estamos hablando de motores caja 68/73, hablemos de la compatibilidad entre estos. Puedes poner un motor caja 68 en un cuadro caja 73, pero el guardapolvo negro que va entre ambas cubetas de motor te quedará corto. Puedes poner un motor caja 73 en un cuadro caja 68. La última versión que ha aparecido de motores con hilo que fue desarrollada por Chris King.
Los motores press fit, a diferencia de los con hilo, se instalan a presión en la caja de motor. Como analogía, el primero sería como los rodamientos de una dirección semi integrada, mientras que el segundo sería como los de una dirección integrada. A pesar de que van a presión estos tipos de rodamientos, existen motores de este estilo que poseen una construcción con hilo para la instalación del motor. Acá con los motores press fit se va todo al carajo en cuanto a nomenclatura. Para algunos tipos de motores como PF30 y BB30, el número hace alusión al diámetro del eje integrado que soportan (30 mm). En otros tipos de motores como el BB86, el número hace referencia al ancho de la caja de motor (86 mm).
Se puede ver que sólo son los rodamientos, golilla, cubre polvo y circlip. Fue diseñado por Cannondale para tener una caja de motor sobredimensionada y así hacerla más rígida, además de soportar sin problemas un eje integrado de 30 mm. Los volantes BB30 y PF30 poseen normalmente un eje más corto que los volantes eje integrado para cajas con hilo BSA/ITA o press fit BB86. Existen volantes BB30/PF30 con ejes más largos, pero son conocidos como BB386EVO, o bien el fabricante especifica que son BB30 con ejes más largos. Estos pueden ser instalados en cajas BB30/PF30, pero con espaciadores para el eje más largo.
Lo mismo que el BB30 de arriba, pero que es 5 mm más ancho hacia el lado de la transmisión. ¿Por qué hacer este esperpento de hacer una caja de motor asimétrica? Explicación del sistema asimétrico de Cannondale. En este sistema los rodamientos van dentro de una cubeta la cual va inserta a presión dentro del cuadro.

Éste es un sistema muy similar al PF30, pero que fue diseñado principalmente para volantes con eje integrado de 24 mm (o similar) en vez de 30 mm. No confundir con la nomenclatura que utiliza Shimano para sus motores press fit. Ejemplo: El motor SM-BB92-41B es un BB86 de la gama Dura Ace. El SM-BB71-41B es un BB86 de la gama 105, y el SM-BB94-41A es un BB92 de la gama XTR (MTB). Diámetro de eje: 24 mm (shimano), 24/22 mm (Sram), 25 mm (Campagnolo), 29 mm (Sram DUB).
Más mezclas/híbridos entre los estándares ya vistos. Comparte varias similitudes con BB30 y BB86. Diámetro de eje: 24 mm (shimano), 24/22 mm (Sram). Otra fusión más de otros dos estándares desarrollado por FSA, y su nombre lo dice. Es una mezcla entre el BB30/PF30 (diámetro del eje) y el BB86 (ancho de caja de motor), por ende BB30+BB86=BB386. Los volantes BB386EVO tienen la particularidad de ser exactamente iguales a los BB30/PF30, pero con un eje más largo para que quepa en la caja de motor más ancha.
El BBRight Direct fit es una variante del BB30, similar al BB30A. El BBRight Press Fit es una variante del PF30, similar al PF30A. En no sé qué año, Sram dio a luz su nuevo estándar de motores y los memes no se hicieron esperar. DUB significa Durable Unifying Bottom Bracket. Consiste en un volante con eje integrado de 28,99 mm de diámetro que es solamente compatible con motores DUB. Lo coloqué como item aparte ya que posee en su haber motores con hilo y press fit.
Para ir concluyendo, decirles que el mundo de los motores es bastante denso y complicado.
| Tipo de Motor | Características Principales | Diámetro de Eje (mm) |
|---|---|---|
| Motores con Hilo | Sistema de rodamientos apernados a la caja del motor | 17 (clásico) |
| Eje Cuadrado (JIS/ISO) | Eje de acero con angulación y profundidad específica | 17 (clásico) |
| Eje Estriado | Evolución del eje cuadrado con estrías | Variable |
| Shimano Hollowtech II | Sistema ampliamente utilizado en diversas gamas | 24 |
| Motores Press Fit (BB30, PF30, BB86) | Instalación a presión en la caja del motor | 30 (BB30/PF30), Variable (otros) |
| BB386EVO | Mezcla de BB30 y BB86 con eje más largo | 30 |
| Sram DUB | Volante con eje integrado compatible solo con motores DUB | 28.99 |