A veces, desechamos elementos sin considerar que podrían tener otro uso, afectando al medio ambiente. En este contexto, la biofabricación emerge como un cambio de paradigma para la producción y el consumo, enmarcando la producción dentro de una economía más circular y sustentable.

Diagrama de la Economía Circular
En el FabLab, se busca crear máquinas como parte de un kit Open Hardware de Biofabricación Digital, utilizando desechos del laboratorio, la facultad, domiciliarios e industriales. Durante enero-febrero de 2019, se trabajó en el primer prototipo de esta máquina.
Hardware y Materiales Iniciales
Para el prototipo inicial, se planificó usar materiales como agar-agar, residuos de café, gelatina en polvo, agua y glicerina. El funcionamiento de la máquina se dividió en tres procesos: dispensado de material particulado, dispensado de agua y dispensado de glicerina.
Desarrollo Paralelo de Software y Hardware
Se decidió avanzar el proyecto de forma paralela en software y hardware, ya que ambas partes son necesarias para un avance óptimo. De esta forma, cada integrante se dedica al área en la que tiene mayores conocimientos.
Componentes y Funcionalidades
Para el pesaje del material granulado, se usará la gramera utilizada en el prototipo anterior. La olla se ubicaría por debajo de la gramera, con movimiento restringido en el plano horizontal gracias a piezas de aluminio fabricadas en el Fablab. Esta olla sería calentada por una cocina de inducción, modificada para ser controlada desde el Arduino Mega.
Para la inyección y medición del agua, se acopla un motor DC a una bomba hidráulica del tipo centrífuga construida en el Fablab. La inyección de glicerina se realiza mediante una jeringa de 20 ml cuyo émbolo es movido por un mecanismo donde un motor paso a paso provoca el giro de un husillo, el cual mueve una tuerca unida al émbolo.
Para revolver el contenido de la olla, se usaría un revolvedor accionado por un motor de corriente continua con una reducción de velocidad entre 2 y 0.5 revoluciones por segundo. Este conjunto estaría sujeto a un sistema accionado por un motor a pasos que elevaría y bajaría el revolvedor de forma lineal.
Placas de Desarrollo
Se usan tres placas de desarrollo:
- Raspberry Pi 2B+: Servidor y centro de control entre la app web y la máquina.
- Arduino Mega: Conectado a la Raspberry Pi 2B+ y a los actuadores, recibe señales digitales y comanda los actuadores.
- Arduino Nano: Conectado a los sensores, a la Raspberry Pi 2B+ y al Arduino Mega, supervisa el funcionamiento del Arduino Mega y se comunica mediante interrupts en caso de emergencia.
Estructura y Distribución de Componentes
El material para la estructura son perfiles de aluminio para máquinas CNC, permitiendo una construcción modular rápida y promoviendo la economía circular. Los componentes electrónicos, el motor de corriente continua unido a la bomba hidráulica y el sistema de inyección se ubicarían en un compartimiento en el lado izquierdo. La cocina de inducción estaría en la parte central y derecha, con la olla encima. Sobre esto, se colocaría el sistema de pesaje y el sistema encargado de subir y bajar el revolvedor, junto con los contenedores para el material sólido.
Dispensado de Material Granulado
Se usará el mismo sistema para todos los materiales granulados. Este sistema consta de una secuencia de pasos para lograr la cantidad necesaria y depositarla en la olla.
Para dispensar el material, se utiliza un tornillo sin fin puesto de forma horizontal, el cual, al girar, empuja el material hacia un agujero en la carcasa del tornillo por donde el material cae. Para este proyecto en específico se usarán cuatro (4) de estos tornillos, permitiendo el uso de cuatro (4) materiales granulados distintos. Todo esto estará ubicado sobre la olla, protegido del calor con aislación.

Ejemplo de Tornillo sin fin
Opciones para Depositar el Material
Se consideraron dos ideas para depositar el material en la olla:
- La gramera unida a un recipiente que giraría 180° para depositar el material.
- El material depositado sobre una superficie delimitada por paredes móviles accionadas por un servomotor.
Finalmente, se optó por la segunda opción, utilizando un servomotor estándar HS-311. Se diseñó un modelo CAD detallado, considerando un plano inclinado para facilitar la caída del material en un recipiente corto.
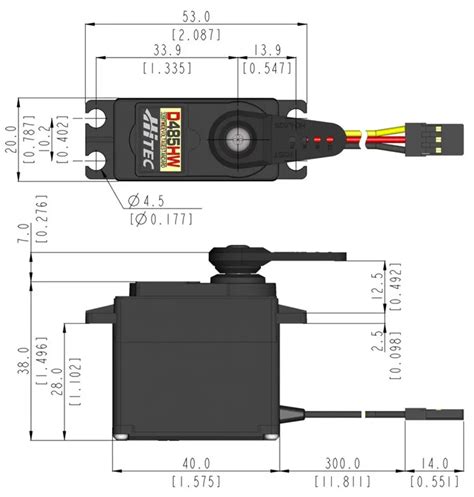
Servo HS-311
Después de esto se determina la distribución de los tornillos que se puede observar en la Figura 12. Se tiene esta distribución de los tornillos sin fin porque permite que la salidas del material queden lo más cerca posible una de otras como se puede observar en la Figura 13, además se tiene que incluir un especia de conducto de tal forma que los recipientes tengan espacio para ser colocados.
Contenedores y Fabricación
Se decide que los contenedores serán botellas de vidrio reutilizadas, por lo tanto la boquilla donda esta botellas serían colocadas tienen que ser diseñadas de forma diferente según el tipo de botella que se logre reciclar, estas boquilla pueden entrar fácilmente en el la entrada del conducto del tornillo sin fin, el diseño de esta se puede observar en las Figuras 14 y 15. La carcasa será fabrica mediante impresora 3D usando PLA. La boquilla será fabricada mediante impresora 3D en PLA, mientras que la válvula y la perilla sería impresas en resina debido a que estas necesitan una mayor resistencia.
USO UNA CUBIERTA DE BICI COMO SUELA DE ZAPATILLA - Life Hack
Dispensado de Agua
Se necesita dispensar agua en cantidades del orden entre 100 ml y 300 ml con la mejor precisión posible, ya que un cambio a más de 5 ml en la receta podría provocar grandes cambios en el biomaterial resultante.
En el primer prototipo de la máquina se analizaron varias ideas como por ejemplo, un sistema por goteo que consistía solo en dejar o no caer agua, cerrando o abriendo una válvula, sin embargo, se descartó porque no había forma precisa de calcular la cantidad de agua que cayera. Otra idea fue el mismo sistema, pero incluyendo sensores de nivel de agura (un sensor de nivel de agua gener aun True o False dependiendo si el agua pasó o no el nivel en donde se posiciona el sensor), pero se descartó también dado que implicaba niveles de agua discretos y la precisión de este método dependía directamente de la cantidad de sensores que se tuvieran.
Pruebas Iniciales
Se utilizan un transistor tipo mosfet como un amplificador de una señal pwm (generada por el microcontrolador) con una fuente DC (fuente de poder) como ganancia. La señal pwm alimenta la bomba de agua y se mantiene un ciclo de trabajo constante. Se presume que, a un voltaje fijo de alimentación, la bomba tendrá un caudal de agua constante, entonces solo bastaría controlar el tiempo en que la bomba esté activa, para controlar el volumen de agua dispensado. Entonces, de esta forma se hace funcionar la bomba durante una cantidad constante de tiempo y se mide la cantidad de agua dispensada con un recipiente graduado y se repite el proceso en reiteradas ocasiones.
Corrección de Errores
Se observaron dos errores en el sistema:
- El motor seguía girando por inercia al apagar la fuente, dispensando agua adicional.
El primer error se elimina agregando una válvula a la salida de la bomba de agua, entonces cuando se apaga la fuente de la bomba, la siguiente instrucción del microcontrolador es cerrar la válvula y así evitar que se siga dispensando agua por inercia del motor.
Controlador PID para la Velocidad del Motor
La idea para solucionar este problema fue implementar un controlador PID para la velocidad de giro del motor de la bomba de agua, de esta forma se le exige al motor girar siempre a la misma velocidad, sin importar la cantidad de masa de agua que lleve la turbina, es decir, sin importar la carga mecánica sobre el eje del motor. Sin embargo, esta idea requería indispensablemente de un "encoder" (enconder es utilizado para medir la posición, velocidad o dirección de giro de un motor) para medir las revoluciones del motor, pero dado el diseño físico de la bomba de agua, era imposible implementarlo.
Adaptación del Encoder
Dada esta posible solución, se comienza extrayendo la tapa original de la bomba de agua, se toman las medidas correspondientes y se diseña un modelo en 3D para luego imprimir la pieza tal que cumpla con las restricciones necesarias para adaptar un encoder al motor de la bomba. Se decide utilizar un sensor de Efecto Hall y un imán diametral de neodimio para construir el encoder.
Entonces, el diseño original de la tapa debe ser modificada para que en su interior, encaje una hélice (para la turbina de la bomba) que contenga un imán (Ver Figura 20) y que además por el exterior de la tapa encaje el sensor de efecto Hall tal que esté directamente expuesto al campo magnético del imán. Dada la complejidad de la pieza, fueron necesarias muchas iteraciones e intentos para desarrollarla de forma correcta. Esto se puede observar en la Figura 18, en la que aparecen las 5 piezas construidas en total, para obtener en el último casi una pieza funciona..