En la búsqueda de soluciones más sustentables y amigables con el medio ambiente, la biofabricación emerge como un cambio de paradigma en la producción y el consumo. Este enfoque innovador enmarca la producción dentro de una economía más circular, generando materiales y productos basados en materia orgánica y biodegradable.
Un ejemplo de esta tendencia es el proyecto desarrollado en el FabLab, que busca crear 6 máquinas como parte de un kit Open Hardware de Biofabricación Digital, el primero de su naturaleza a nivel mundial. Este kit utiliza desechos del laboratorio, de la facultad, domiciliarios e industriales, transformando lo que antes se consideraba basura en valiosos recursos.
Durante enero-febrero de 2019 se trabajó en el primer prototipo de esta máquina, combinando hardware y software de manera paralela para optimizar el desarrollo.
Componentes y Funcionamiento del Prototipo
Para el prototipo inicial, se seleccionó un número acotado de materiales, incluyendo agar-agar, residuos de café, gelatina en polvo, agua y glicerina. El funcionamiento de la máquina se dividió en tres procesos generales:
- Dispensado de material particulado
- Dispensado de agua
- Dispensado de glicerina
Hardware: Estructura y Componentes Mecánicos
El material utilizado para construir la estructura son perfiles de aluminio para máquinas CNC, debido a que este sistema permite una construcción modular rápida. Además de tener la característica de estar formado por aluminio, material fácilmente reciclable, lo que promueve la enconomia circular.
Para el pesaje del material granulado se usará la gramera utilizada en el prototipo anterior. La olla se ubicaría por debajo de la gramera y tendría restringido su movimiento en el plano horizontal gracias a piezas de aluminio fabricadas en el Fablab. Esta olla sería calentada por una cocina de inducción.
Para revolver el contenido de la olla se usaría un revolvedor que tendría una forma que calzaría con la forma de la superficie interior de ella, este revolvedor sería accionado por un motor de corriente continua con una reducción tal que la velocidad del revolvedor sea entre 2 a 0.5 revoluciones por segundo, se decide el uso de un motor DC ya que no es necesario controlar con una precisión demasiado alta la velocidad de giro del revolvedor, por lo que simplemente sería necesaria un sistema de control de lazo abierto.
Este conjunto estaría sujeto a un sistema que se encargaría de elevar y bajar el revolvedor, este sistema es sumamente importante ya que permitiría un acceso cómodo a la olla, lo cual suma relevancia al considerar que se estaría trabajando en una zona donde habría superficies a alta temperatura como lo sería la olla y su contenido.
Este sistema estaría accionado por un motor a pasos que accionaría el movimiento de un husillo, el que levantaría todo el conjunto revolvedor más motor dc de forma lineal en dirección perpendicular al suelo. Se decide usar un motor a pasos para esta tarea debido a que se tiene que controlar la altura final e inicial del conjunto.
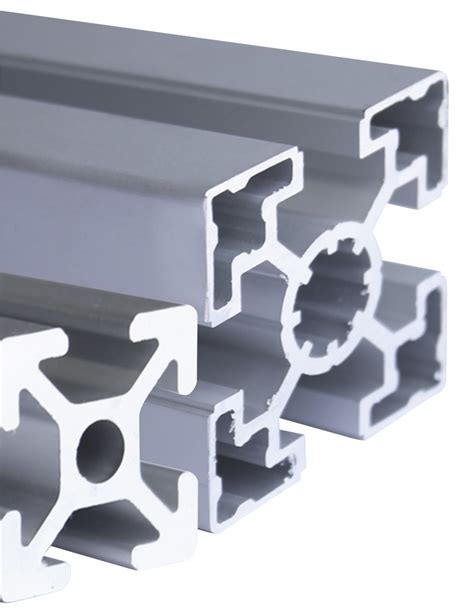
Perfiles de aluminio para la estructura.
Dispensado de Materiales Granulados
Para dispensar el material, se utiliza un sistema que consta de un tornillo sin fin puesto de forma horizontal, el cual, al girar, empuja el material hacia un agujero en la carcasa del tornillo por donde el material cae. Este tornillo sin fin es accionado por un motor nema 17. Para este proyecto en específico se usarán cuatro (4) de estos tornillos, permitiendo el uso de cuatro (4) materiales granulados distintos. Todo esto estará ubicado sobre la olla, protegido del calor con aislación.
Para depositar el material en la olla se tienen dos ideas. La primera idea considera que la gramera esté unida por la parte superior a un recipiente en el cual se depositaría el material granulado y, al finalizar el pesaje, la gramera giraría en 180° en el eje "Y" mediante un motor servo para depositar el material en la olla y volviendo, luego de esto, a la posición original en espera del siguiente uso. La ventaja de este sistema consistía en su simplicidad debido a que, generalmente, los sistemas simples, si son bien diseñados, suelen presentar menos fallas que los complejos.
La segunda opción se piensa en que le material granulado se deposite sobre una superficie delimitada por paredes móviles, éstas se podrían mover gracias a un servomotor fijo que accionaría un sistema biela-manivela, el cual movería las paredes. La idea detrás de este sistema es que, al moverse las paredes, éstas empujen el material granulado a un agujero que tenga las mismas dimensiones del área delimitada por la pared, de esta forma el ingrediente caería a través de este agujero a la olla; la gramera sostendría todo este sistema.

Tornillo sin fin para dispensar materiales granulados.
Sistema de Inyección de Glicerina
La inyección de glicerina se hace mediante una jeringa de 20 ml cuyo émbolo es movido por un mecanismo en que un motor paso a paso provoca el giro de un husillo, el cual mueve una tuerca unida al émbolo.
Dispensado de Agua
Se necesita dispensar agua en cantidades del orden entre 100 ml y 300 ml con la mejor precisión posible, ya que un cambio a más de 5 ml en la receta podría provocar grandes cambios en el biomaterial resultante.
Para la inyección y medición del agua, se acopla un motor DC a una bomba hidráulica del tipo centrífuga construida en el Fablab.
Inicialmente, se realizan pruebas simples con un microcontrolador (Arduino Nano), un transistor, una bomba de agua y una fuente de poder. Se utiliza un transistor tipo mosfet como un amplificador de una señal pwm (generada por el microcontrolador) con una fuente DC (fuente de poder) como ganancia. La señal pwm alimenta la bomba de agua y se mantiene un ciclo de trabajo constante. Se presume que, a un voltaje fijo de alimentación, la bomba tendrá un caudal de agua constante, entonces solo bastaría controlar el tiempo en que la bomba esté activa, para controlar el volumen de agua dispensado.
El primer error es que, al apagar la fuente de alimentación de la bomba de agua (al terminar el tiempo dado para dispensar agua), el motor seguía girando por su propia inercia, por o que seguía dispensando agua, entonces durante ese lapso de tiempo, se dispensaba una cantidad indeterminada de agua que variaba de prueba en prueba, lo que claramente agregaba un error aleatorio al sistema. Este primer error se elimina agregando una válvula (una válvula de agua cierra o abre el paso de agua rápidamente) a la salida de la bomba de agua, entonces cuando se apaga la fuente de la bomba, la siguiente instrucción del microcontrolador es cerrar la válvula y así evitar que se siga dispensando agua por inercia del motor.
La idea para solucionar este problema fue implementar un controlador PID para la velocidad de giro del motor de la bomba de agua, de esta forma se le exige al motor girar siempre a la misma velocidad, sin importar la cantidad de masa de agua que lleve la turbina, es decir, sin importar la carga mecánica sobre el eje del motor.
Dada esta posible solución, se comienza extrayendo la tapa original de la bomba de agua, se toman las medidas correspondientes y se diseña un modelo en 3D para luego imprimir la pieza tal que cumpla con las restricciones necesarias para adaptar un encoder al motor de la bomba. Se decide utilizar un sensor de Efecto Hall y un imán diametral de neodimio para construir el encoder.

Bomba hidráulica para el dispensado de agua.
Software: Control y Automatización
Se usan tres placas de desarrollo:
- Una Raspberry Pi 2B+ encargada de ser el servidor y funciona como centro de control entre la app web y la máquina.
- Un Arduino Mega conectado a la Raspberry Pi 2B+ y a todos los actuadores de la BioMixer. Éste se encarga de recibir las señales digitales desde la Raspberry Pi, las procesa y luego comanda los diferentes actuadores a través del tipo de señal correspondiente con el actuador.
- Finalmente se tiene un Arduino Nano que está conectado con todos los sensores, a la Raspberry Pi 2B+ y al Arduino Mega. Esta placa se encarga de supervisar el funcionamiento del Arduino Mega y se comunica a éste mediante interrupts de hardware en caso de algún tipo de emergencia según información proveniente desde de algún sensor, o ante la necesidad de enviar información importante.
CONTROL BOMBA DE AGUA CON PRESIÓN CONSTANTE USANDO PID VARIADOR & PLC LOGO! || EXPLICACIÓN
Placas Arduino utilizadas en el proyecto.